3. Software Structure Overview¶
3.1. Startup¶
The startup code begins in the function _c_int00() in
app/main/fstartup.c. After initialization of the main
microcontroller registers, memory, system clock and interrupts,
the C function main() is called.
In general/main.c, interrupts are enabled and the initializations of the
microcontroller unit, peripherals and software modules are done (e.g.,
hardware modules like SPI and DMA). The OS is than started.The steps are
indicated by the global variable
os_boot. At the end of the main function, the operating system resources
(tasks, events, queues, mutex) are configured in
OS_InitializeOperatingSystem() (os/os.c) and the scheduler is started.
All configured tasks (FreeRTOS threads) are then started depending on
their priority. The successful activation of the tasks is indicated by
os_boot = OS_RUNNING.
The OS-scheduler first calls the highest priority task. All other cyclic tasks
are blocked in a while-loop until the initialization of this
task finishes. At the beginning of the task,
FTSK_InitializeUserCodeEngine() is called.
In this function, the database is initialized. Once finished, this is indicated
by os_boot = OS_ENGINE_RUNNING.
The function FTSK_RunUserCodeEngine() is then called, where the diagnostic
module and the database are managed.
Once os_boot = OS_ENGINE_RUNNING, the 1ms cyclic task is unblocked. The
function FTSK_InitializeUserCodePreCyclicTasks() is called once first.
This function is called when the OS and the database are running but before
the cyclic tasks run. Once FTSK_InitializeUserCodePreCyclicTasks() has
finished, all cyclic tasks are unblocked from there while-loop and run
periodically.
3.2. Operating System¶
A critical section must be entered with the function
OS_EnterTaskCritical() and exited with the function
OS_ExitTaskCritical().
The operating system configuration can be found in the file
FreeRTOSConfig.h. It should not be written directly. The configuration
has to be made with HALCoGen. Changes to this file will be overwritten by
HALCoGen. A detailed explanation of the parameters is given
at https://www.freertos.org/a00110.html.
3.3. Software Architecture¶
The database runs with the highest priority in the system and provides asynchronous data exchange for the whole system. Fig. 3.2 shows the data exchanges implemented via the database.
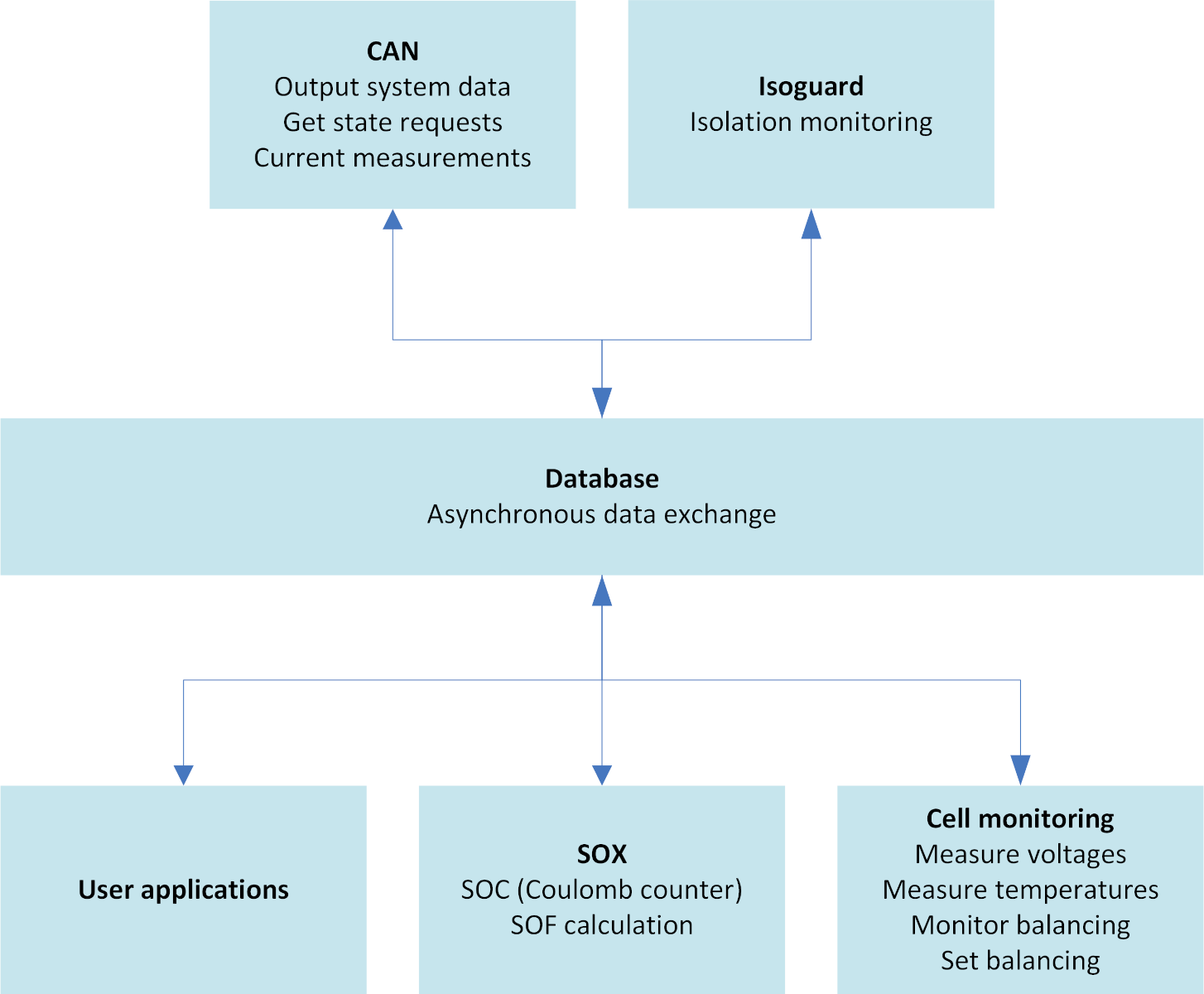
Fig. 3.2 Asynchronous data exchange with the foxBMS 2 database¶
Fig. 3.3 shows the main structure of foxBMS 2.

Fig. 3.3 Main tasks in foxBMS 2¶
The two key modules used are:
SYS
BMS
SYS has a lower priority than the database and a higher priority than
BMS. Both modules are implemented as a state machine, with a trigger
function that implements the transition between the states. The trigger
functions of SYS and BMS are called in FTSK_RunUserCodeCyclic10ms().
SYS controls the operating state of the system. It starts the other
state machines (e.g., BMS).
BMS gathers info on the system via the database and takes decisions based
on this data. The BMS is driven via CAN. Requests are made via CAN to go
either in STANDBY mode (i.e. contactors are open) or in NORMAL mode (i.e.
contactors are closed). A safety feature is that these requests must be sent
periodically every 100ms. BMS retrieves the state requests received via
CAN from the database and analyses them. If the requests are not sent
correctly, this means that the controlling unit driving the BMS has a
problem and the correctness of the orders sent to the BMS may not be given
anymore. As a consequence, in this case BMS makes a call to CONT
to open the contactors. Currently, BMS checks the cell voltages, the cell
temperatures and the global battery current. If one of these physical
quantities violates the safe operating area, BMS makes the
corresponding call to CONT to open the contactors. BMS is
started via an initial state request made in SYS.
A watchdog instance is needed in case one of the aforementioned tasks hangs.
This watchdog is made by the System Monitor module which monitors all
important tasks (e.g., Database, SYS, BMS): if any of the
monitored tasks hangs, this will be detected.
A last barrier is present in case all the preceding measures fail: the hardware watchdog timer. In case it is not triggered periodically, it resets the system.
3.4. Diagnostic¶
The DIAG module is designed to report problems on the whole system. The
events that trigger the DIAG module have to be defined by the user. The
event handler DIAG_Handler(...) has to be called when the event is
detected. The way the system reacts to a Diag event is defined via a
callback function or by the caller according the return value.
3.5. Data stored in the database¶
The following data is stored in the database:
Cell voltages
Cell temperatures
SOX (Battery state, contains e.g., State-of-Charge)
Balancing control
Balancing feedback
Current sensor measurements (includes pack voltages at different points)
Hardware information
Last state request made to the BMS
Minimum, maximum and average values for voltages and temperatures
Measurement from isolation monitor
Interface to communicate via I2C with extra functionalities on slave (e.g., EEPROM, port expander)
Result from open-wire check on slaves
Error state of the BMS (i.e. error flags, set to 0 or 1)
MSL, maximum safety limits
RSL, recommended safety limits
MOL, maximum operating limits
Calculated values for moving average
Contactor feedback
Interlock feedback
BMS state (e.g., standby, normal, charge, error)
Current limits calculated for State-of-Function
Voltages read on GPIOs of the slaves
